GPS temel olarak üç ana bölüme ayrılan bir yapıya sahiptir. Bunlar;
• Uzay Bölümü : 20200 km yükseklikte, yer etrafında bir dönüşünü yaklaşık 12 saatte tamamlayacak şekilde yörünge hareketi yapan uyduları kapsar.
• Kontrol Bölümü : Uzay Bölümündeki uyduların kontrol ve yönetimini sağlamak üzere, ekvator bölgesinde dünyaya uygun olarak konuşlandırılmış bir adet ana-master, beş adet izleme ve üç adet veri yükleme (aynı zamanda izleme noktalarındadır) istasyonlarından oluşur.
• Kullanıcı bölümü : Söz konusu uydulardan sürekli olarak yayımlanan sinyali algılayabilecek alıcılara sahip olan tüm kullanıcıları kapsar.
Sistemin basit çalışma prensibi aşağıda ifade edilen üç aşamada açıklanabilir;
1’nci Aşama: Uydular, Newton ve Kepler yasalarına uygun olarak, kontrol bölümünden kendilerine yüklenen konum ve hız bilgileriyle yörünge hareketini gerçekleştirirken, L1 (1575.42 MHz), L2 (1227.60 MHz) ve L5 (1176.45 MHz: yeni frekans olup 2005 yılında test yayını yapmakta; 2010’lu yıllarda tüm uydularda olacaktır) taşıyıcı frekansları üzerinden yere,
• Kod Bilgileri (C/A: sivil-kaba kod; P: Askeri-hassas Kod)
• Faz Bilgileri (taşıyıcı frekansın kendisi)
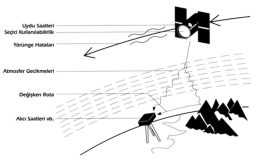
• Navigasyon Mesaj Bilgilerini ( Uydu konum, uydu saat, iyonosfer hata terimi vb. bilgiler)
sürekli olarak gönderirler.
2’nci Aşama: Bu frekansların aynılarını ve üzerinde yüklü kodların kopyalarını üretme yeteneğine sahip bir (GPS) alcısının anteni, uydudan gelen sinyali algılar.
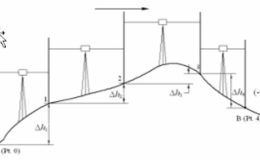
3’üncü Aşama: Alıcının içindeki saat ile uydu saat bilgilerini senkronize ederek sırasıyla kod ve faz bilgilerini karşılaştırır ve uydu-alıcı mesafesini (range) hesaplar.
UYDU-ALICI MESAFESİ UA : ÖLÇÜLEN
SİNYAL-IŞIK HIZI C : 299 792 458 m/sn
DT : Kodların Karşılaştırması
Ancak uydu saatleri ile alıcı saatleri arasındaki duyarlık (kalite) farkları nedeniyle tam olarak senkronize olamayan saatlere yönelik bir “zaman hatası” terimi ( c x ót ) yukarıdaki UA eşitliğine (UA= C x DT) eklenerek uydu-alıcı arasında “pseudo-range” olarak adlandırılan hata içerikli mesafe elde edilir. Sonuç olarak belirlenen mesafe,
R= UA + c . ót (1) olur.
Benzer karşılaştırma uydu sinyallerini oluşturan taşıyıcı dalganın “faz”ı ile de yapılır. Faz bilgileri uydulardan ilk algılanma süreçlerinde “belirsizliği” taşıyor olmaları nedeniyle çok duyarlı konumlama çözünürlüğü (2 mm. daha küçük) sağlıyor olmakla birlikte, ilk konumlama için geçen süre, sinyale sürekli bağlantılı kalma ve belirsizlik bilinmeyeninin çözümü gibi nedenlerden dolayı gözlem sonrası hesaplama (post-process) işlemlerini uygulayan bilimsel çalışmalarda daha çok kullanılır.
Ancak anlık konumlama gereksinimi olan kullanıcılar, yukarıda ifade edilen kod bilgileriyle elde edilen konumlama prensibine dayalı alıcıları kullanılırlar.
No related posts.
Bu yazı yorumlara kapatılmıştır.